Engineering > QUESTIONS & ANSWERS > FANUC Test Questions (All)
FANUC Test Questions
Document Content and Description Below
FANUC Test Questions
To display the contents of a Device, you must Generate a Directory. - ✔✔True
Teach Pendant programs can be loaded from the FILE menu and one other menu.
What is the other screen? - ✔✔Select menu
...
[Show More]
Last updated: 2 months ago
Preview 1 out of 6 pages
Instant download

Buy this document to get the full access instantly
Instant Download Access after purchase
Reviews( 0 )
$9.00
143
0
Document information
Connected school, study & course
About the document
Uploaded On
Aug 27, 2022
Number of pages
6
Written in
All

Additional information
This document has been written for:
Uploaded
Aug 27, 2022
Downloads
0
Views
143
Document Keyword Tags
Recommended For You
Get more on QUESTIONS & ANSWERS »

$25
136 Pages
Radar Systems Analysis and Design Using MATLAB, 4e by Bassem M...

$25
147 Pages
Interplanetary Astrodynamics, 1st Edition by David Spencer, Da...
$22
456 Pages
SOLUTIONS MANUAL for Non Linear Dynamics and Chaos With Applic...
$22
317 Pages
Solutions Manual for Control Systems Engineering, 8th Edition...

$26
157 Pages
Power Plant Engineering, 1e by Farshid Zabihian (Solutions Man...

$25
66 Pages
Undergraduate Instrumental Analysis, 8e by Thomas Bruno, James...
, 1e by Cristiane Surbeck, Jeff Kuo.png)
$25
62 Pages
Site Assessment and Remediation for Environmental Engineers (F...

$25
189 Pages
Physical Principles of Plasma Physics and Engineering, 3e by A...

$25
302 Pages
Modeling of Dynamic Systems with Engineering Applications, 2e...
$25
105 Pages
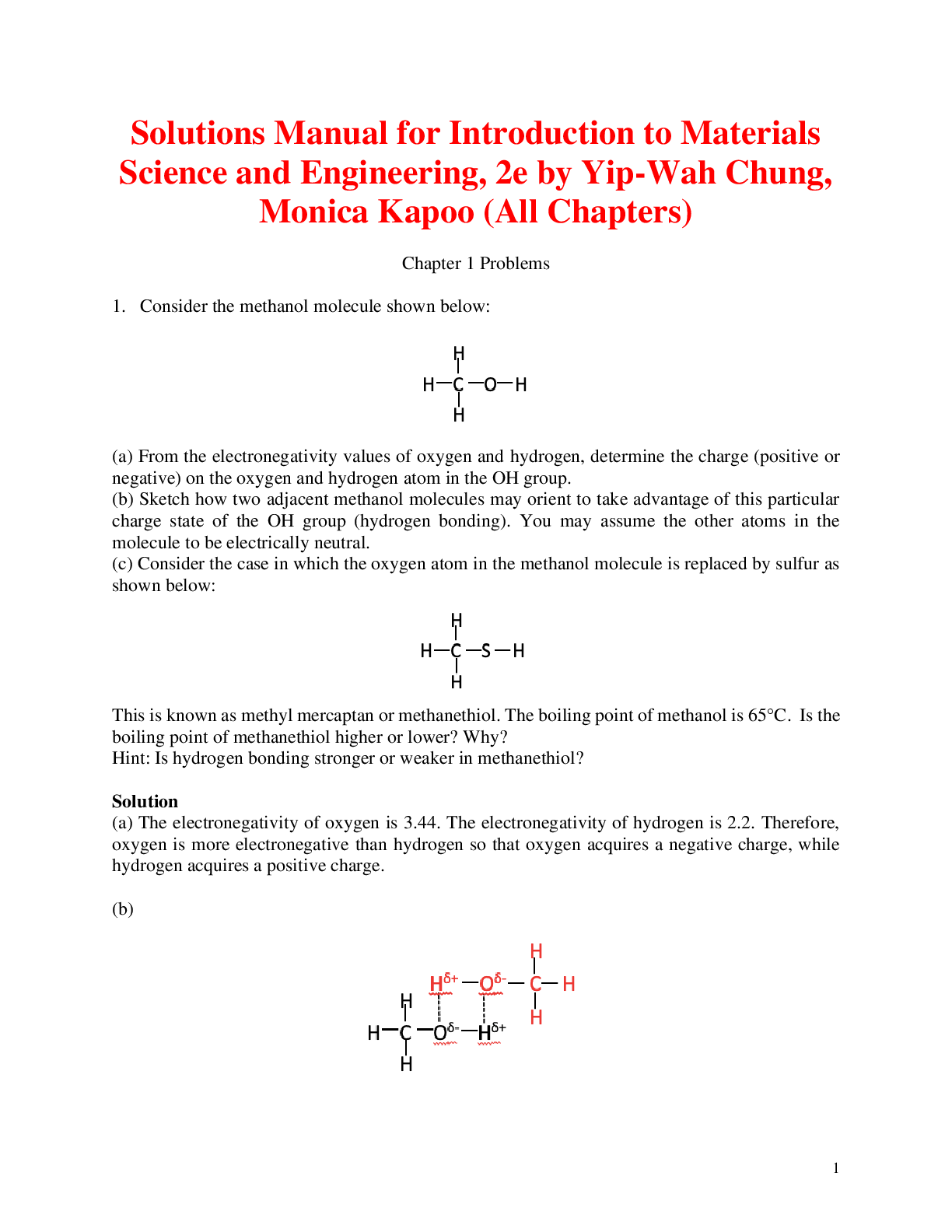
Introduction to Materials Science and Engineering, 2e by Yip-W...

$25
67 Pages
Introduction to Electrochemical Science and Engineering, 2e by...

$25
179 Pages
An Introduction to Sonar Systems Engineering, 2e by Lawrence Z...
, 1e by Fariborz Tayyari.png)
$25
61 Pages
Cost Analysis for Engineers and Scientists (Manufacturing and...

$25
148 Pages
Computer Methods in Chemical Engineering, 1e by Nayef Ghasem (...

$25
111 Pages
Computational Fluid Dynamics for Mechanical Engineering, 1e by...
$25
58 Pages
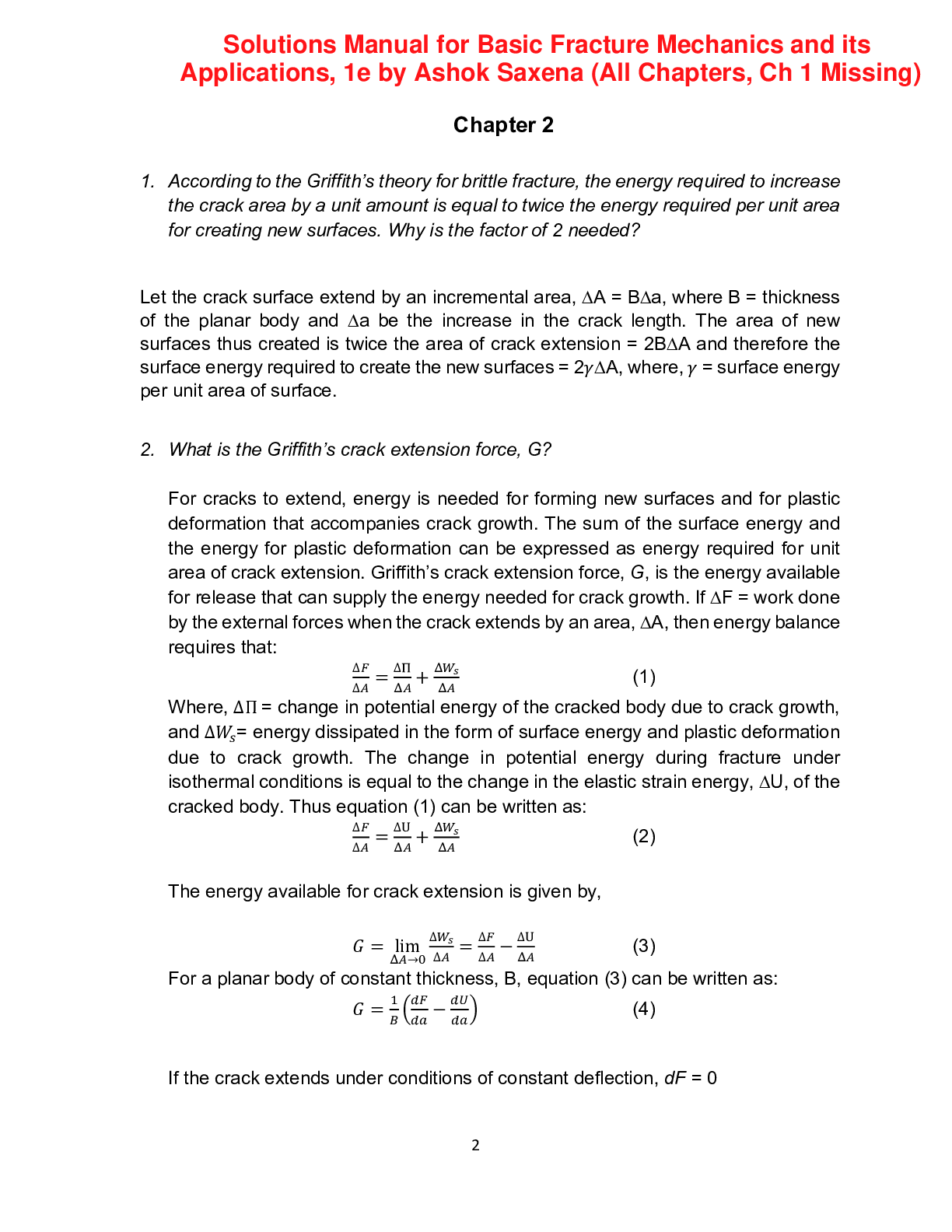
Basic Fracture Mechanics and its Applications, 1e by Ashok Sax...
$25
376 Pages
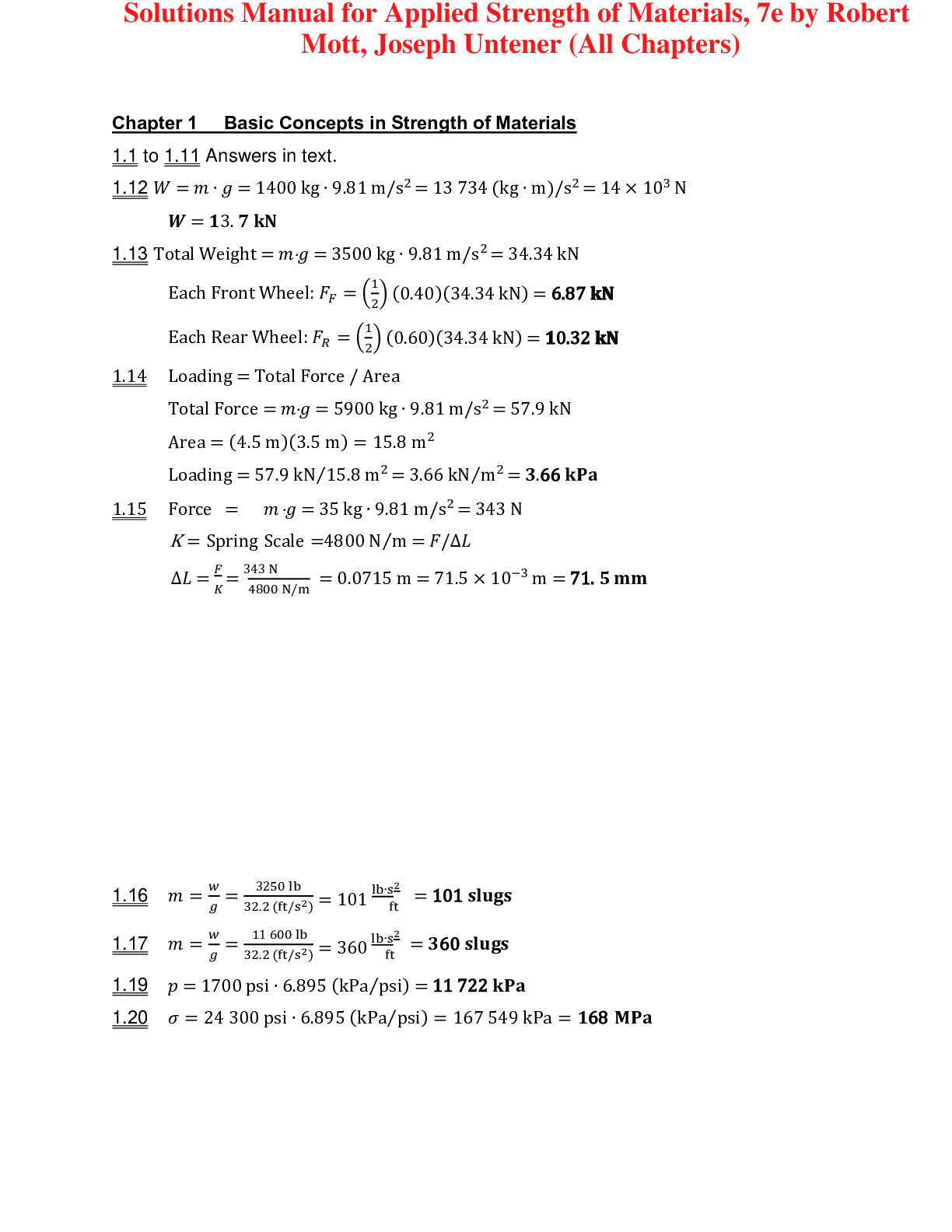
Applied Strength of Materials, 7e by Robert Mott, Joseph Unten...

$25
56 Pages
Mechanics of Materials An Integrated Learning System, 4e Timot...
More related documents below


![Preview of [SOLVED] EDCO 740 / EDCO740 Quiz 1 (LATES 2021/2022 Graded A)](https://scholarfriends.com/storage/EDCO_740_Quiz_1.png)