Computer Networking > QUESTIONS & ANSWERS > EECS 461 Embedded Control - University of Michigan _ EECS 461 Problem Set 6: SOLUTIONS1 (All)
EECS 461 Embedded Control - University of Michigan _ EECS 461 Problem Set 6: SOLUTIONS1
Document Content and Description Below
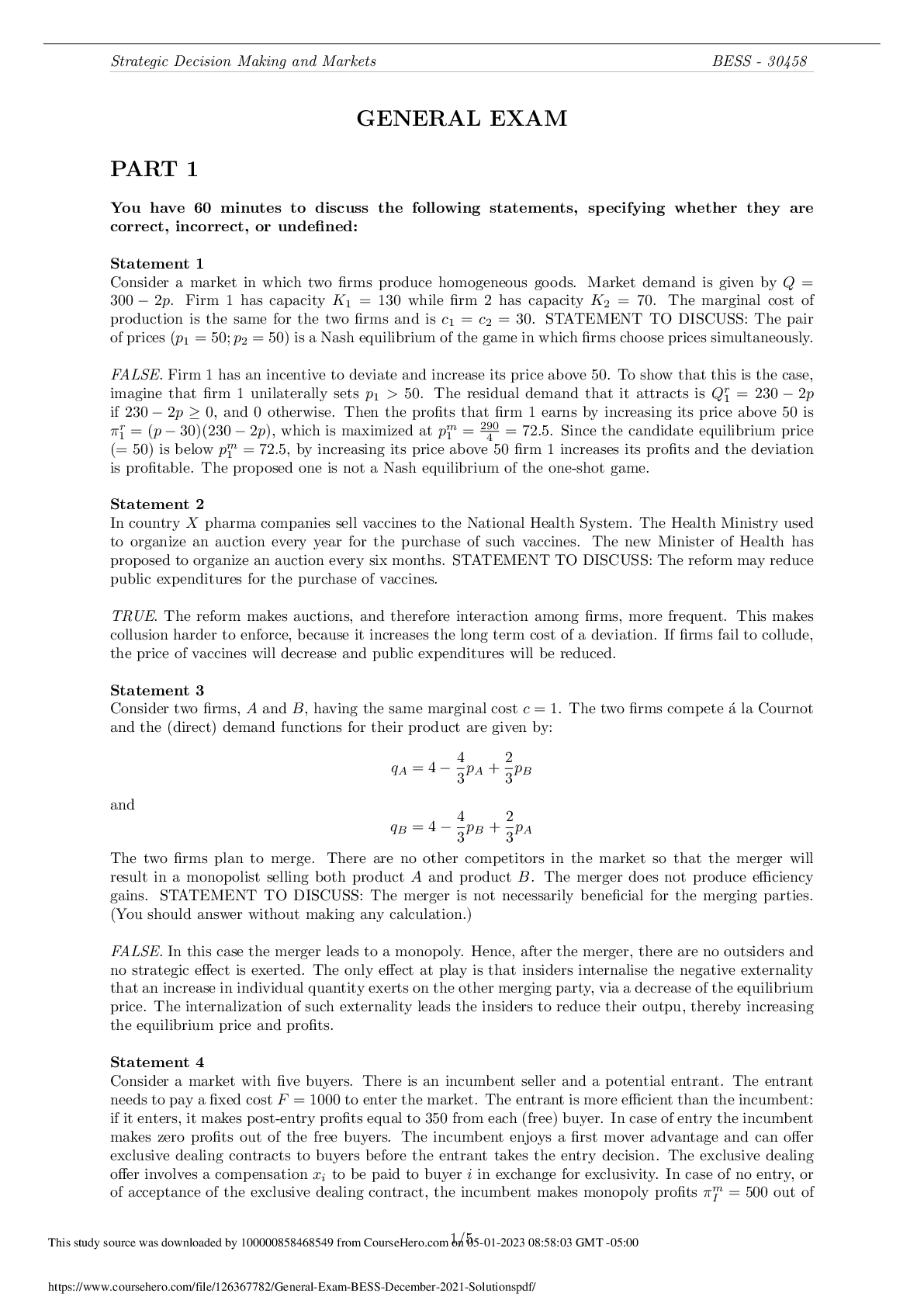
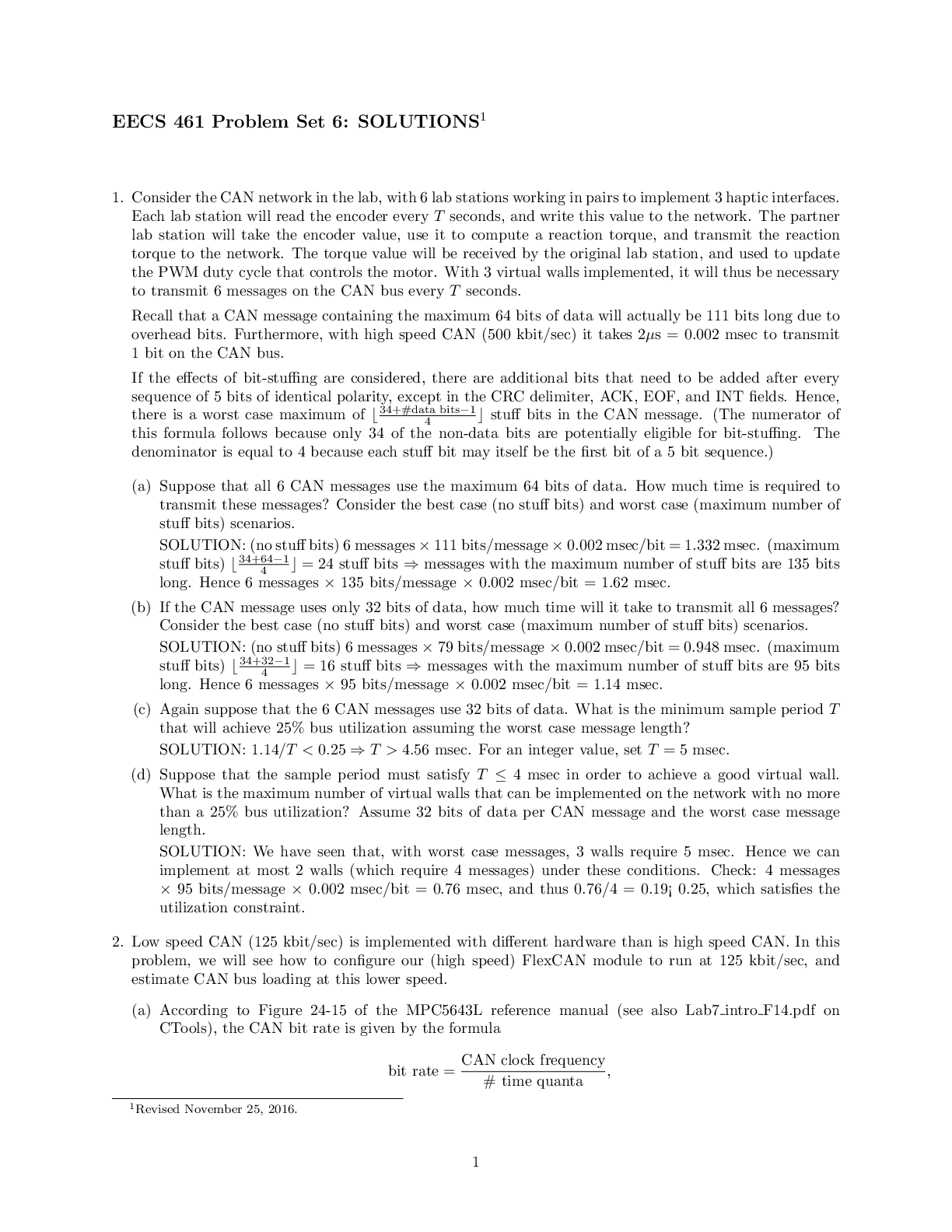
EECS 461 Embedded Control - University of Michigan _ EECS 461 Problem Set 6: SOLUTIONS1 1. Consider the CAN network in the lab, with 6 lab stations working in pairs to implement 3 haptic interfaces ... . Each lab station will read the encoder every T seconds, and write this value to the network. The partner lab station will take the encoder value, use it to compute a reaction torque, and transmit the reaction torque to the network. The torque value will be received by the original lab station, and used to update the PWM duty cycle that controls the motor. With 3 virtual walls implemented, it will thus be necessary to transmit 6 messages on the CAN bus every T seconds. Recall that a CAN message containing the maximum 64 bits of data will actually be 111 bits long due to overhead bits. Furthermore, with high speed CAN (500 kbit/sec) it takes 2µs = 0.002 msec to transmit 1 bit on the CAN bus. If the effects of bit-stuffing are considered, there are additional bits that need to be added after every sequence of 5 bits of identical polarity, except in the CRC delimiter, ACK, EOF, and INT fields. Hence, there is a worst case maximum of b 34+#data bits 4 -1 c stuff bits in the CAN message. (The numerator of this formula follows because only 34 of the non-data bits are potentially eligible for bit-stuffing. The denominator is equal to 4 because each stuff bit may itself be the first bit of a 5 bit sequence.) 2. Low speed CAN (125 kbit/sec) is implemented with different hardware than is high speed CAN. In this problem, we will see how to configure our (high speed) FlexCAN module to run at 125 kbit/sec, and estimate CAN bus loading at this lower speed. [Show More]
Last updated: 2 years ago
Preview 1 out of 2 pages
Buy this document to get the full access instantly
Instant Download Access after purchase
Buy NowInstant download
We Accept:

Reviews( 0 )
$9.50
Can't find what you want? Try our AI powered Search
Document information
Connected school, study & course
About the document
Uploaded On
Apr 09, 2023
Number of pages
2
Written in
All

Additional information
This document has been written for:
Uploaded
Apr 09, 2023
Downloads
0
Views
67