Computer Architecture > Lab Experiment > CEG 3136 Lab 2: Hardware Interfacing - Keypad: PURPOSE: To introduce the interfacing of the Motorola (All)
CEG 3136 Lab 2: Hardware Interfacing - Keypad: PURPOSE: To introduce the interfacing of the Motorola 9S12DG256 through an implementation of a keypad unit.
Document Content and Description Below
Last updated: 3 years ago
Preview 1 out of 10 pages
Instant download

Buy this Document to get the Full Access Instantly
Provided by Students Who Aced it
We Verify Document Content to Gurantee Accuracy
Reviews( 0 )
Document information
Connected school, study & course
About the document
Uploaded On
Oct 14, 2020
Number of pages
10
Written in
All

Additional information
This document has been written for:
Uploaded
Oct 14, 2020
Downloads
0
Views
277
Document Keyword Tags
Recommended For You
Get more on Lab Experiment »
CEG 3136 LAB 2: Hardware Interfacing Computer Architecture II

LAB 2: Hardware Interfacing – Keypad CEG 3136 - Computer Archi...
Lab Report > CEG3136 LAB 1 Report Introduction to Microprocess...

Solution Manual for Computer Graphics with Open GL 4th Edition...

Computer Organization and Architecture 10e William Stallings (...
Computer Organization and Architecture 10e William Stallings (...

SOLUTIONS MANUAL for Elementary Statistics Using Excel, 7th Ed...
Security+ Renewal - Domain 3.0 / Security Architecture Assessm...
Introduction to Cryptography with Coding Theory, 3rd Edition b...
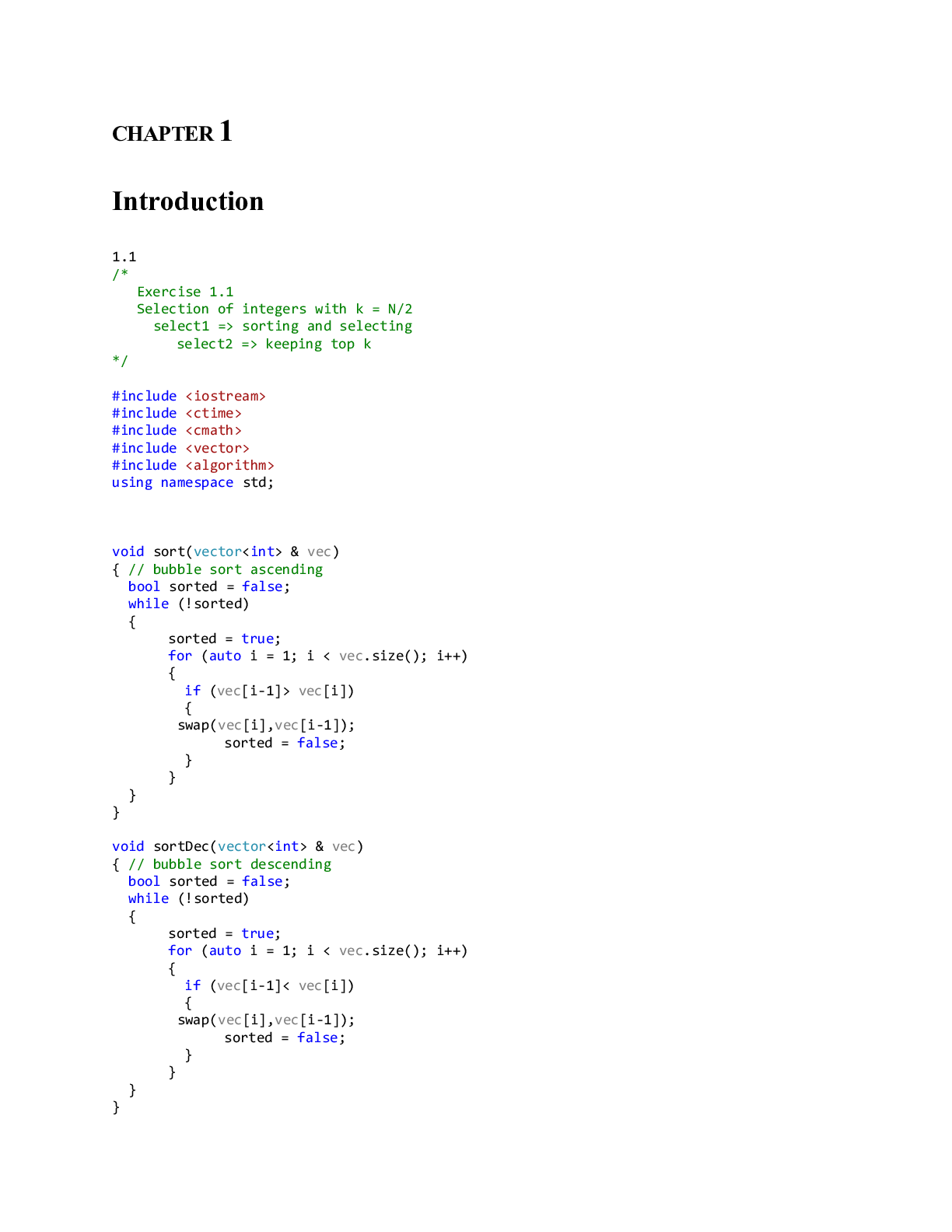
Solutions Manual for Data Structures And Algorithm Analysis In...
Product-Led SEO: The Why Behind Building Your Organic Growth S...
Test Bank For COMM2 2nd Edition By Verderber Deanna, Rudolph F...
TEST BANK For CompTIA Network+ Guide to Networks 10th Edition...
Test Bank For The New Perspectives Collection, Microsoft® Offi...
Solution Manual for The New Perspectives Collection, Microsoft...
Solution Manual with Test Bank For Exploring Microsoft Office...

Questions and Answers > Agile E1 (CBO) 60566 DOWNLOAD TO GET A...




.png)






