Computer Science > Lab Report > ME 262 Digital Logic - University of Waterloo _ PLC Robot Pick Place Lab Report (All)
ME 262 Digital Logic - University of Waterloo _ PLC Robot Pick Place Lab Report
Document Content and Description Below
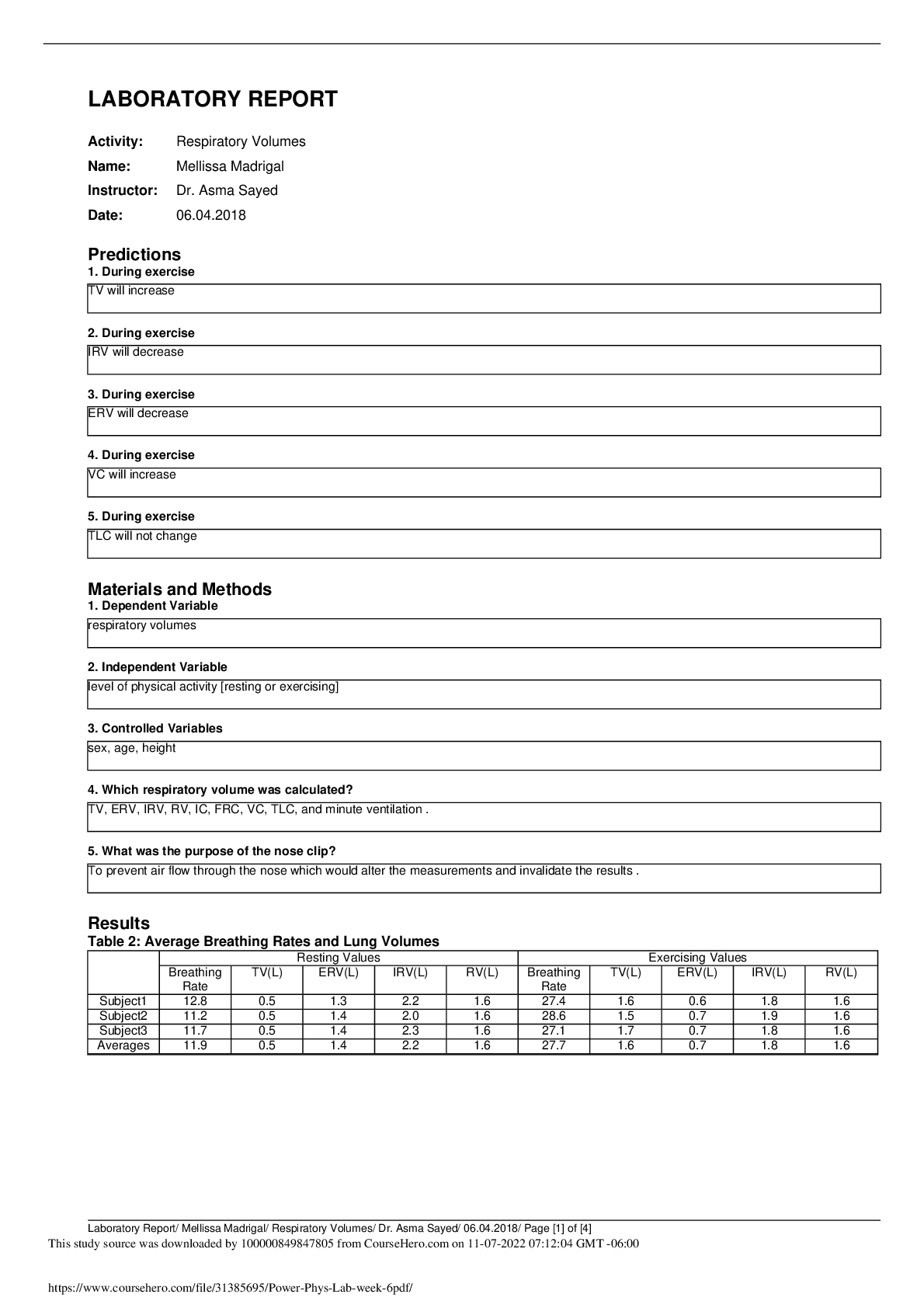
PLC Robot Pick Place Lab Report Introduction: The purpose of the lab was to apply the learned PLC programming knowledge to a real industry problem. The problem was to program a PLC controlled pneum ... atic robot to pick up a puck and place it at a specified location (i.e. pick and place task). The equipment used in the lab included a computer with RSLogix500 Pro software, a PLC program simulator (i.e. the black box), and a pneumatic robot. Procedure: 1. Construct a graphical representation for the function of the robot (i.e. the state diagram). 2. Use the state diagram to create the PLC program on the computer. 3. Debug the program on the PLC simulator. 4. Test the program on the pneumatic robot. Content: The state diagram that was used in the lab was our own diagram. Multiple iterations were created after it was noted that improvements could be made. The first state diagram draft contained nine different states, which was one more than the allowable amount. It was found that the first state was repeated at the very end, thus the redundant state was removed. This initial state diagram contained only the outputs and the transition conditions. This diagram was then developed into a second state diagram with only 6 states. It was theorized that the grab function and the function that moved the robot in the positive direction could be reused. It was then realized that it would not be possible to differentiate between two separate transition states to result in a different outcome. The state diagram was then reverted back to eight states, now redrawn in a circular pattern. Two states were added to account for the state of the St input, in order to efficiently move the robot arm back to the origin. [Show More]
Last updated: 2 years ago
Preview 1 out of 3 pages
Buy this document to get the full access instantly
Instant Download Access after purchase
Buy NowInstant download
We Accept:

Reviews( 0 )
$8.50
Can't find what you want? Try our AI powered Search
Document information
Connected school, study & course
About the document
Uploaded On
Apr 29, 2023
Number of pages
3
Written in
All

Additional information
This document has been written for:
Uploaded
Apr 29, 2023
Downloads
0
Views
193


.png)




.png)