Report for Experiment #13
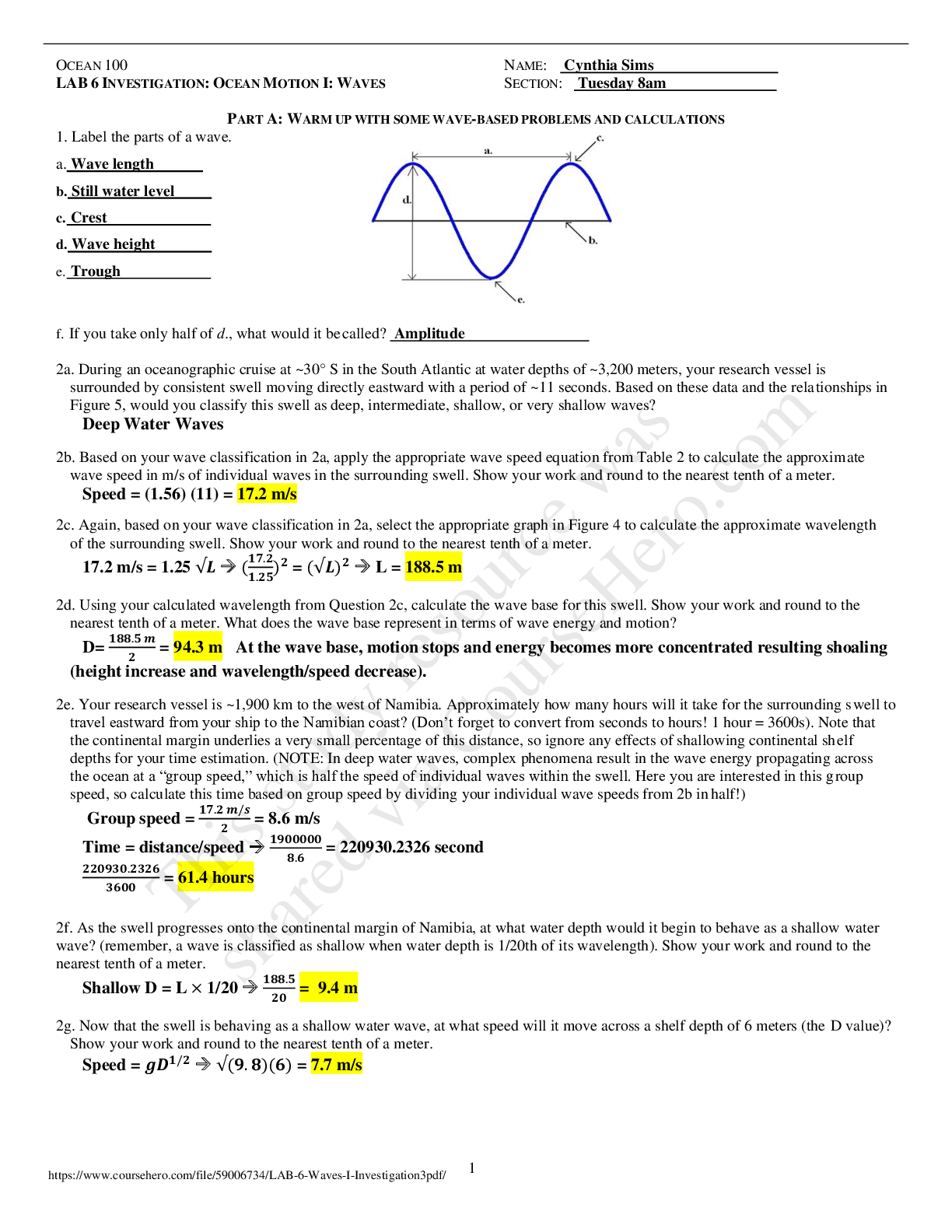
Simple Harmonic Motion
Adilsultan Lepes
Lab Partner: Sanjali Sur
TA: Wei-Chi Chiu
Experiment Date: 05/10/17
Abstract
In this experiment we have investigated the oscillatory motion of the
...
Report for Experiment #13
Simple Harmonic Motion
Adilsultan Lepes
Lab Partner: Sanjali Sur
TA: Wei-Chi Chiu
Experiment Date: 05/10/17
Abstract
In this experiment we have investigated the oscillatory motion of the glider on the air table 2 with
springs, which are restoring forces. A simple harmonic motion will remain in motion as long as
the system does not experience friction. For that reason, air table is used to minimize the friction.
Our experiment will demonstrate how the glider with two springs will behave in a simple harmonic
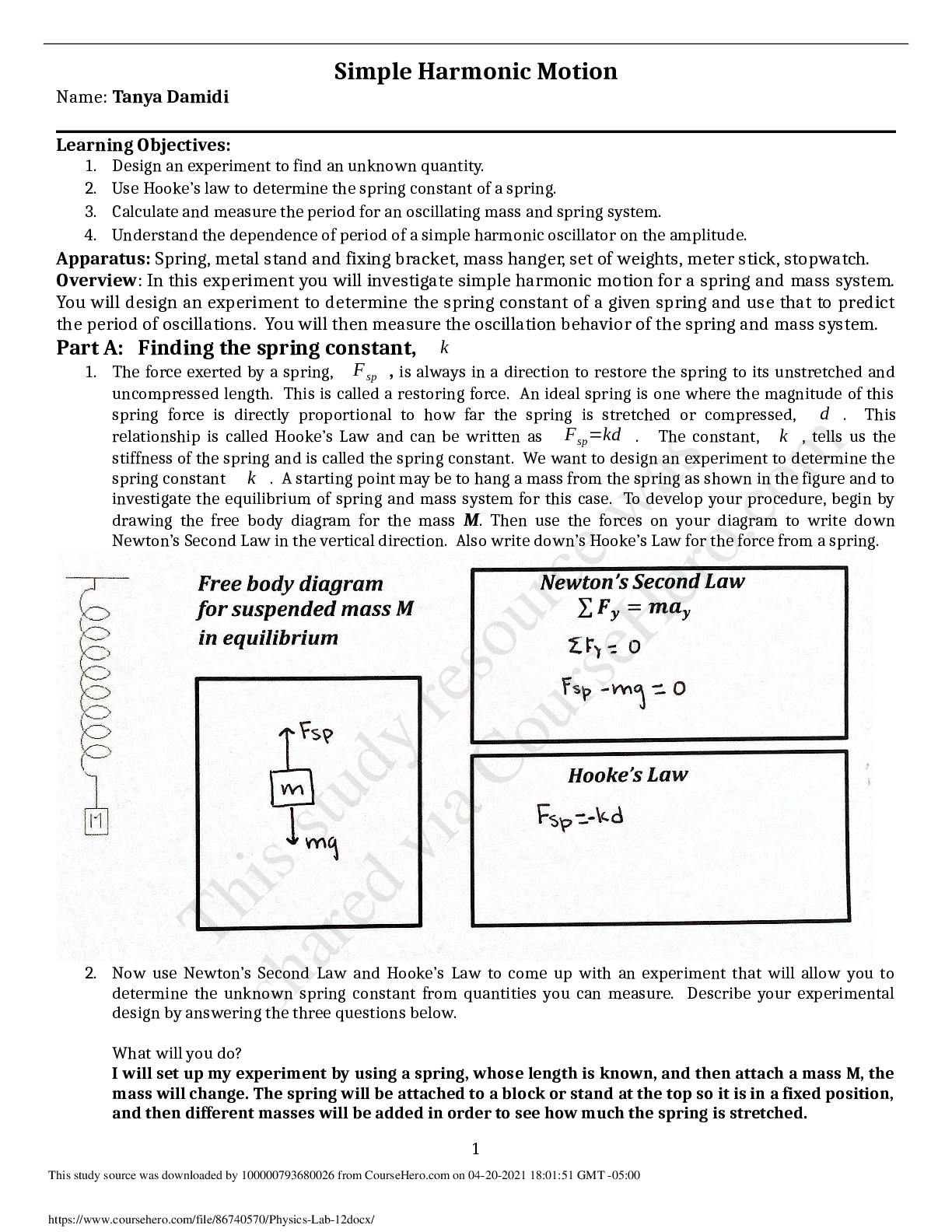
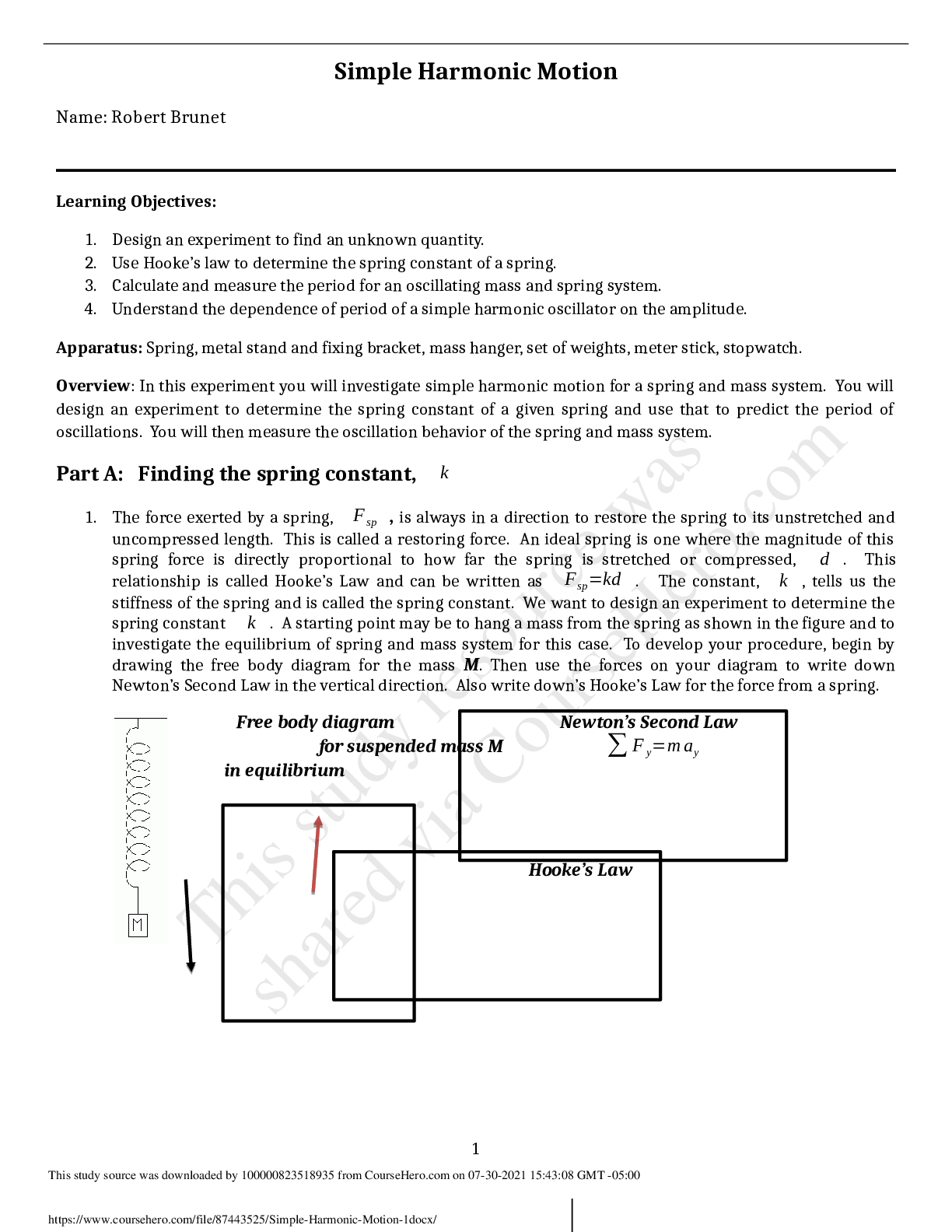
motion as well as damped harmonic motion using the sets of magnets.Introduction
In this experiment, we have analyzed the simple harmonic motion from the two sets of
investigations. The experiment data was recorded by PASCO Capstone software and motion
sensor. For both investigations we need an air track and a glider, as well as two springs and 6
magnetic weights of same color. In the first investigation we have found parameters like amplitude,
period, phase, and spring constant for undamped motion. Later, these results served as a basis for
the second investigation, that uses magnets of the same color to show damping motion. The second
investigation is similar to the first investigation, and allowed us to perform damped harmonic
motion. The use of six magnets increased the magnitude of the damping forces, causing the
changes in period, amplitude, frequency and angular frequency. The analysis and results of both
investigations should agree with each other.
Investigation 1
Setup & Procedure
This investigation required the use of the air track and the glider, and two springs. The air track
was leveled to the secure an equilibrium position of the glider, while the air was turned on to
minimize the friction force between track and glider. Motion of the glider was recorded with the
help of the motion sensor which is connected to the computer. When all necessary preparations
were done, we have recorded oscillations of the glider attached two springs to the sides of the
glider and connected to the ends of the air track, at its equilibrium position for 30 seconds. The
rest part of the investigation studies the motion of the glider released 40 cm from the left end of
the air track. Glider was released, and its motion was recorded by computer program until we get
6 peaks. Using this data, we have computed the k spring constant.
Data & Analysis
?"#$%&'(??) 0.3764 ??"#$%&'(??) 0.05
Equilibrium Position (m) 0.64
Peak Number 1 2 3 4 5 6
Amplitude (m) 0.25 0.22 0.2 0.17 0.15 0.13
Time (s) 1.025 3.5 6.2 8.85 11.4 14.05
Period T (s) (slope) 2.61357 ?? (?) 0.000239046
Frequency (Hz) 0.382618411 ?? (??) 3.51352E-05
Angular Frequency
(rad/s)
2.403991475
??
???
?
0.000220755
Experimental k (N/m) 2.175281475
??
? ?
0.017645813
Theoretical spring k
(N/m)
2.2 phase angle -2.464091262
Table 1 – Measurements and CalculationsThe equilibrium position was found to be 0.64 ?. To achieve smooth data plots we have subtracted
the equilibrium position from the oscillating glider position data to obtain the centered positions
of the oscillating glider. Next we have plotted the oscillating glider data in Excel (centered position
vs time). In the Figure 1 we can see that the graph is centered around the x-axis due to subtraction
of the equilibrium position. Using the plot of this graph we have determined first 6 peaks with their
amplitude and their respective times. The time and position of these 6 peaks was recorded in the
Table 1.
[Show More]

.png)


.png)



.png)
.png)

.png)
.png)
.png)

.png)
.png)


.png)




.png)
.png)
